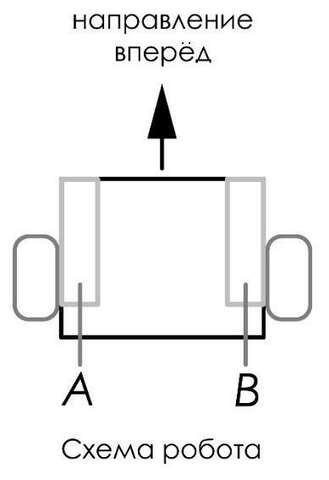
ДАЮ 20 БАЛЛОВ ОЧЕНЬ СРОЧНО Робот оснащён двумя отдельно управляемыми колёсами, радиус каждого из колёс робота равен 8 см. Левым колесом управляет мотор А, правым колесом управляет мотор В. Колёса напрямую подсоединены к моторам (см. схему робота).
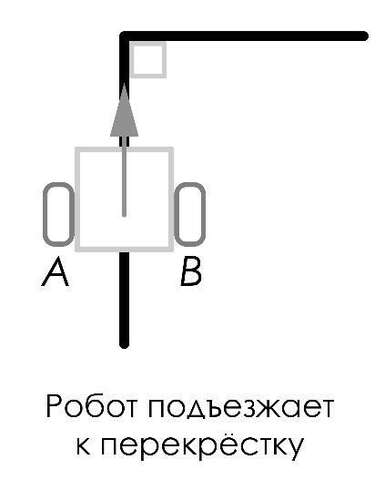
Траектория движения робота определяется различными режимами работы моторов. Режим работы мотора задаётся двумя параметрами:направление вращения оси мотора:«–» – вращение назад;«+» – вращение вперёд;«0» – отсутствует вращение;количество градусов, на которое повернётся ось мотора.Робот выезжает на перекрёсток (передней частью к перекрёстку), после чего он должен повернуть на 90° по часовой стрелке.Максимальная скорость вращения моторов 2 об/с. Длина колёсной базы робота равна 40 см. Масса робота равна 5 кг.Определите оптимальные режимы работы моторов А и В, при которых робот будет совершать поворот вокруг центра колёсной базы. В ответ для каждого мотора запишите число градусов со знаком,например – 360, +120.Число градусов при необходимости округлите до целых.Мотор A:Мотор B: